
Ich habe in der Vergangenheit schon öfter über die neue Modellreihe der tschechischen Firma KAVAN-RC berichtet; so über den 2,2 m Pulse, den 1,5 m Alfa oder auch über den Semiscale-Segler TwinShark. Alle Modelle bestachen durch eine super Vorfertigung, Verarbeitung sowie kurzer Bauzeit. Mit dem vorliegenden Swift-S1 hat Kavan ein weiteres Semiscale-Modell neben dem TwinShark auf den Markt gebracht, dieses mal jedoch ein reinrassiges Kunstflugmodell.

ENTWICKLUNG DES MANTRAGENDEN SWIFT
Die Swift-S1 wurde als Nachfolger des SZD 21-2B Kobuz 3 konstruiert. Der Kobuz 3 wurde aufgrund eines Flügelbruchs (der Kobuz war noch in Holz gefertigt) bei der Weltmeisterschaft 1989 für den Kunstflug gesperrt. Es sollte ein zeitgemäßes Nachfolgemuster geschaffen werden, das allerdings die bewährte Auslegung des Kobuz beibehalten sollte. Involviert in die Entwicklung des Swift war auch der damalige dreifache Weltmeister J. Makula. Aus Zeitgründen wurde die Negativform des Flügels einfach von einem gespachtelten und geschliffenen Holzflügel des Kobuz abgenommen; allerdings mit fatalen Folgen, denn der rechte Kobuz-Flügel hatte eine leichte Verwindung. Das hatte zur Folge, dass die ersten Swift eine deutliche Rolltendenz nach links aufwiesen. Diese wurde mit einer Kante am Querruder ausgeglichen; jedoch war das alles nicht optimal. Ab Seriennummer 17 wurde die Form nachgebessert und der Fehler behoben.

DAS KAVAN-TESTMODELL
Alle Komponenten sind fertig eingebaut; so sind ein leistungsstarker Brushless-Elektromotor C3548-750 mit einem 11 x 8 Zoll-Klapppropeller und einem Regler KAVAN R-50SB mit einem leistungsstarken BEC-Stabilisator, der für die Stromversorgung von vier hauseigenen KAVAN-Servos an Bord erforderlich ist, installiert. Die Verkabelung des Motors zum Regler ist fertig, ja sogar bereits im Rumpf mit etwas Kleber gesichert. Die Kabinenhaube ist abnehmbar und wird von einem Magneten gehalten. Neben dem Regler befindet sich der 4s Antriebsakku; Kapazitäten von 2.200 bis 2.700 mA / h sind geeignet. Auch das Akkubrett nebst Klettverschlüssen ist fertig eingebaut, dahinter wird der Empfänger platziert; in meinem Fall der neue Jeti R9 Slim Line und ein Jeti MVario.
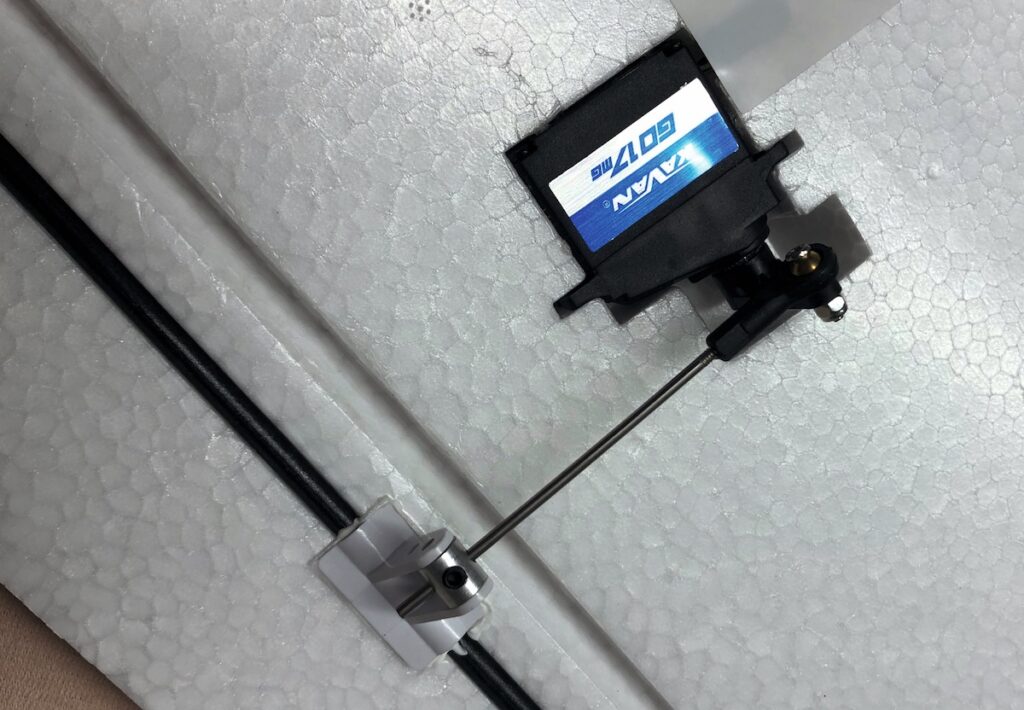
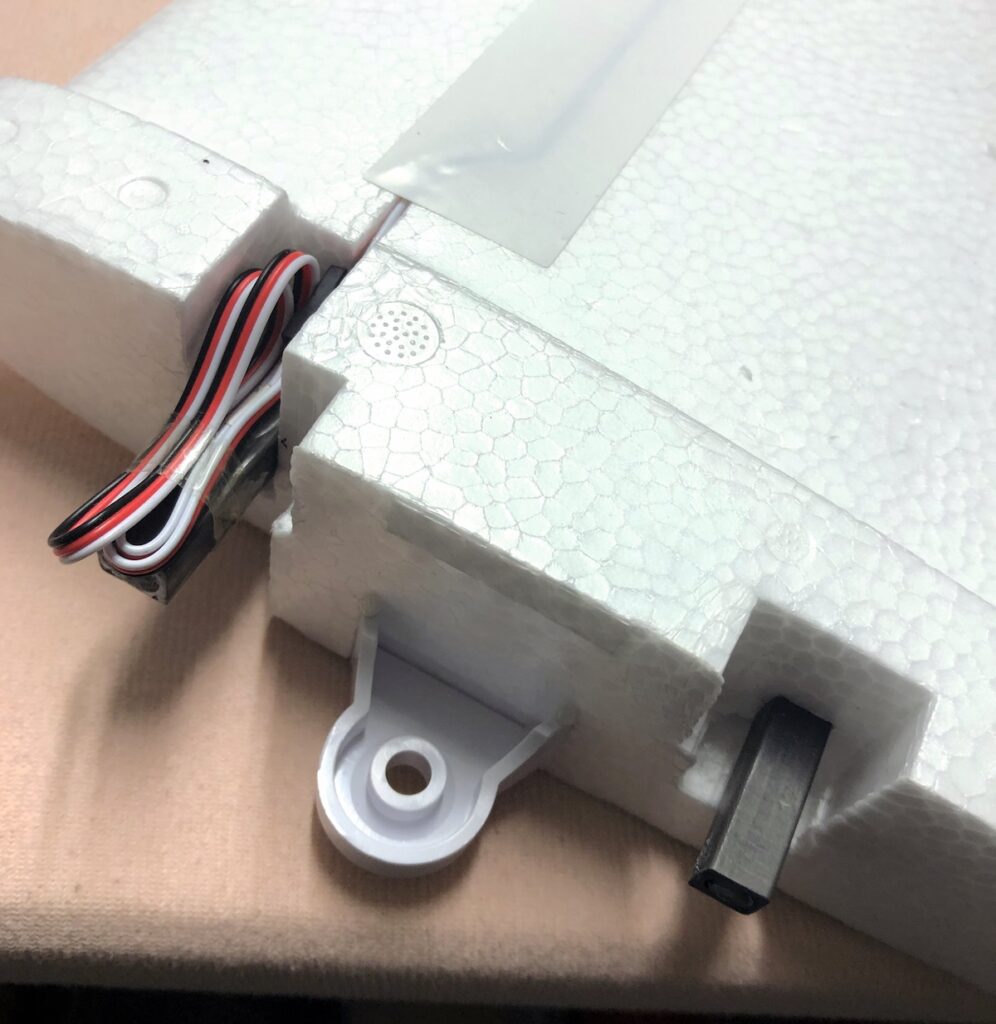
Die Seiten- und Höhenruderservos befinden sich im Heck; alle Gestänge sind fertig abgelenkt. Zunächst wird das Höhenruder aufgeschraubt, danach wird die Seitenruderklappe eingeklipst. Zu erwähnen ist, dass alle Ruder nicht über EPP angelenkt sind, sondern über eigene kleine Scharniere verfügen. An den beiden Flügelhälften muss quasi nichts gemacht werden; die Servos sind montiert und auch die Gestänge bereits eingehängt. Zu erwähnen ist, dass der Swift über keine Bremsklappen oder Wölbklappen verfügt; es ist ein reiner Zwei-Klappen-Flügel. Die Tragfläche aus EPO-Schaum besteht aus zwei Teilen mit Kohlefaser-Leisten, deren herausgeführte Teile auch als Flügelverbinder dienen und in die Duraluminiumgehäuse im Rumpf passen. Beide Flügelhälften werden von oben zentral unter dem Motto Keep it simple mit einer Kunststoffschraube verschraubt.
Ist der RX eingebaut, können die entsprechenden Kabel an den RX eingesteckt werden; ein Verwechseln der Kabel ist ausgeschlossen, denn alle Servokabel sind entsprechend beschriftet. Etwas fummelig ist das Durchführen der beiden Querruderkabel durch den Rumpf bis hin zum RX, obwohl die Kabel entsprechend lang sind. Der Autor hat hier zwei Verlängerungskabel genommen und vom RX nach außen gezogen. Hier können nun die beiden Querruderstecker eingesteckt und nach innen hereingezogen werden. Wer es noch besser haben möchte, baut entsprechende MPX-Stecker ein und verklebt diese. So erhält man direkt beim Aufstecken der Flügelhälften die entsprechenden Kontakte.

Zu guter Letzt wird die Anlage programmiert; die beiden Querruder standen nicht ganz gerade, so dass die Gestänge entsprechend nachjustiert wurden. Wie immer: Erst mechanisch die Gestänge justieren; erst dann über den Sender an der Servomitte drehen und wenn an der Servomitte gedreht wird, nicht über 10%. Alles andere ist nicht optimal. Auch unsere hochmodernen Computerfernsteuerungen lassen eine saubere mechanische Einstellung eines Modells nicht entfallen. Die Ruderausschläge wurden entsprechend der ausführlichen Bauanleitung eingestellt, ferner Flugphasen wie Thermik / Speed angelegt. Da der Regler nicht telemetriefähig ist, wurde eine Motorlaufzeit-Uhr mit vier Minuten eingerichtet. Hier hatte ich ja die Erfahrungen schon bzgl. Laufzeit durch den KAVAN TwinShark.

Da der Swift weder über Störklappen noch Wölbklappen verfügt, wurde eine Landeflugphase angelegt. Hier werden dann die beiden Querruder hochgefahren und auch in dieser Flugphase die Querruderdifferenzierung umgedreht; d. h. in der Landephase mit hochgestellten Querrudern kommt nach oben …




